

 联系我们
联系我们

轴组转换功能是指切换(安装/分离)带多个外部轴的工具(抓手等,以下称“抓手” )的功能。本功能和伺服点焊换枪功能非常接近,可以理解为通用用途下的“换枪功能”。
本文以带外部轴的抓手更换进行示例,示例中,将带2爪的抓手称为轴组S1,将带3爪的抓手称为轴组S2。机器人夹持S1的抓手进行动作时,将程序控制轴组称为R1+S1;机器人夹持S2的抓手进行动作时,将程序控制轴组称为R1+S2,如下图所示:

图一:机器人不抓取抓手时
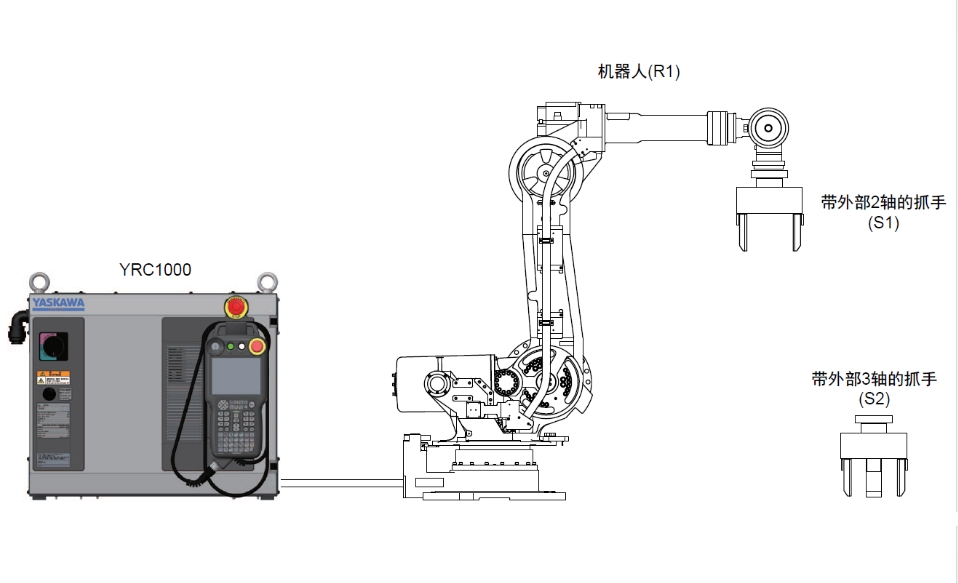
图二:机器人抓取抓手S1时

图三:机器人抓取抓手S2时
二、轴组转换命令含义
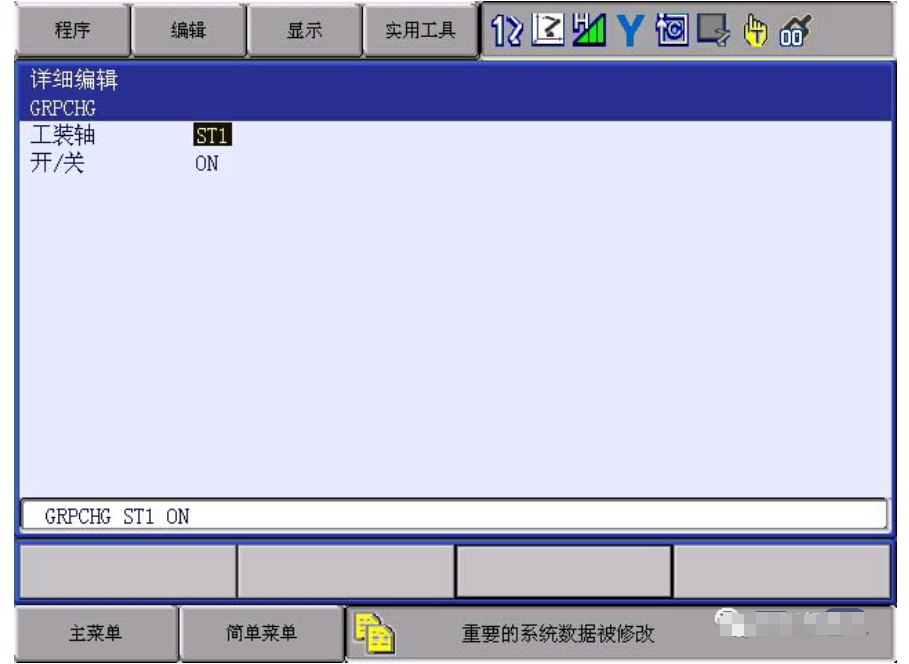
进行轴组转换时,必须执行GRPCHG(轴组转换)命令。GRPCHG命令可登录到程序为“机器人”轴组的JOB中。指令形式如下:
GRPCHG S1 ON
① ②
① 选择要切换的轴组。可从轴组转换对象的轴组中选择。
② 指定所选轴组的ON/OFF(安装/分离)。
ON :将指定电机的电源置于ON。
OFF :将指定电机的电源置于OFF。
三、轴组转换命令登录
1. 将光标移至登录GRPCHG命令处的前面。
2. 按命令一览
– 显示命令一览对话框
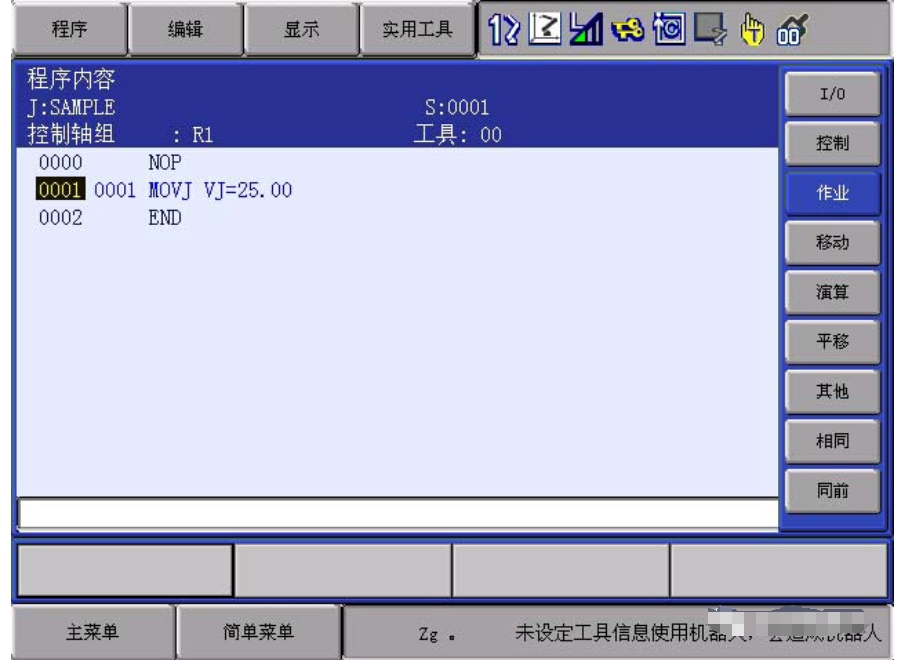
3. 选择“作业”
– 显示GRPCHG命令

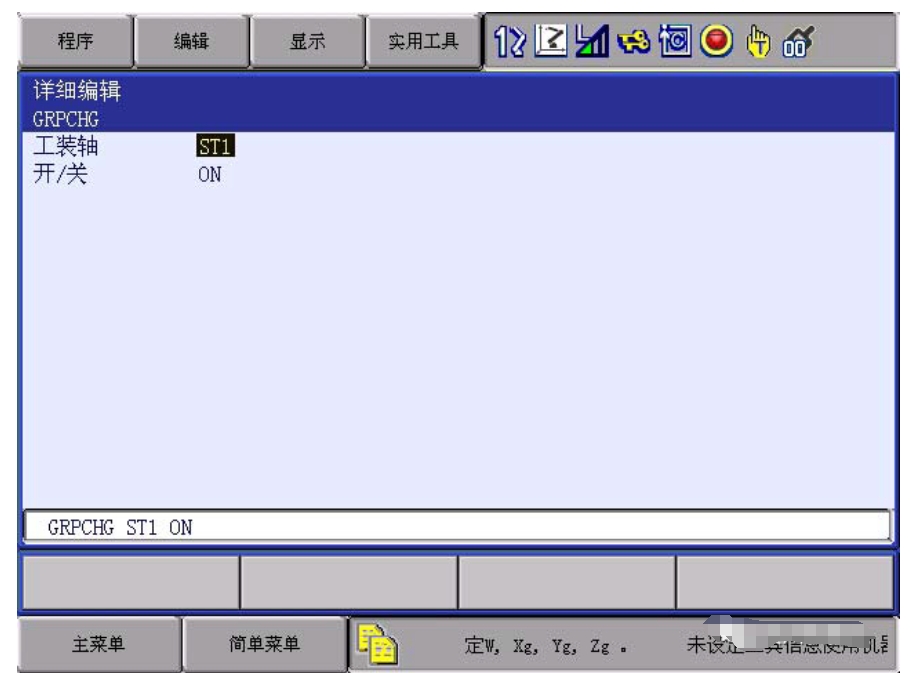
4. 选择GRPCHG命令
– 选择GRPCHG后,输入缓冲行显示“GRPCHG”命令。
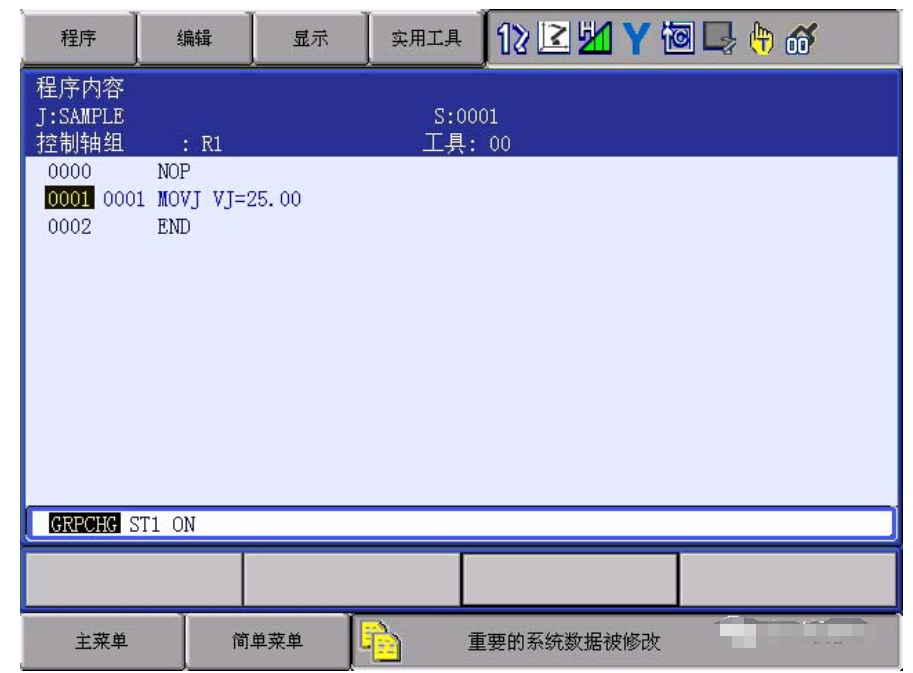
5. 变更数值数据
– <直接登录>
如要直接登录输入缓冲行的命令,请进行操作步骤6的操作
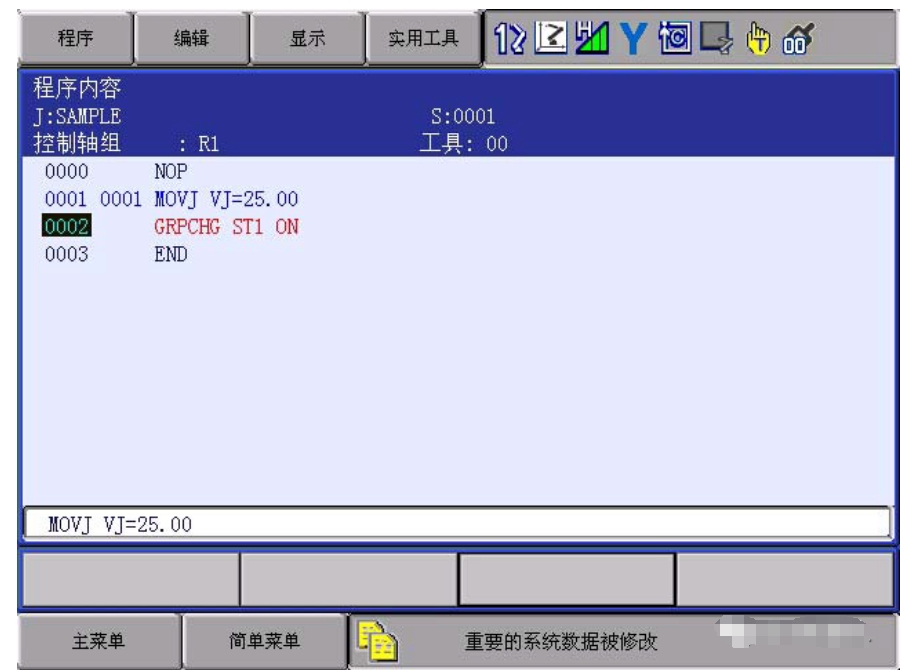
6. 按[插入]→ [回车]
– 输入缓冲行显示的命令被登录。
四、程序举例
<安装抓手(S1)的程序示例>
程序名:HAND1-ON
控制轴组:R1
<分离抓手(S1)的程序示例>
程序名:HAND1-OFF
控制轴组:R1

五、注意事项
1、GRPCHG必须在机器人夹持转换对象抓手的状态下执行,通过GRPCHG命令指定未夹持的抓手时将发生报警。当前夹持的抓手种类、ID、夹持状态可通过以下信号进行识别。
S4C537:GRP识别信号(开始位)
S4C538:GRP识别信号(结束位)
例:将GRP识别信号分配给IN10(开始)~13(结束)时,即设定S4C537=10, S4C538=13

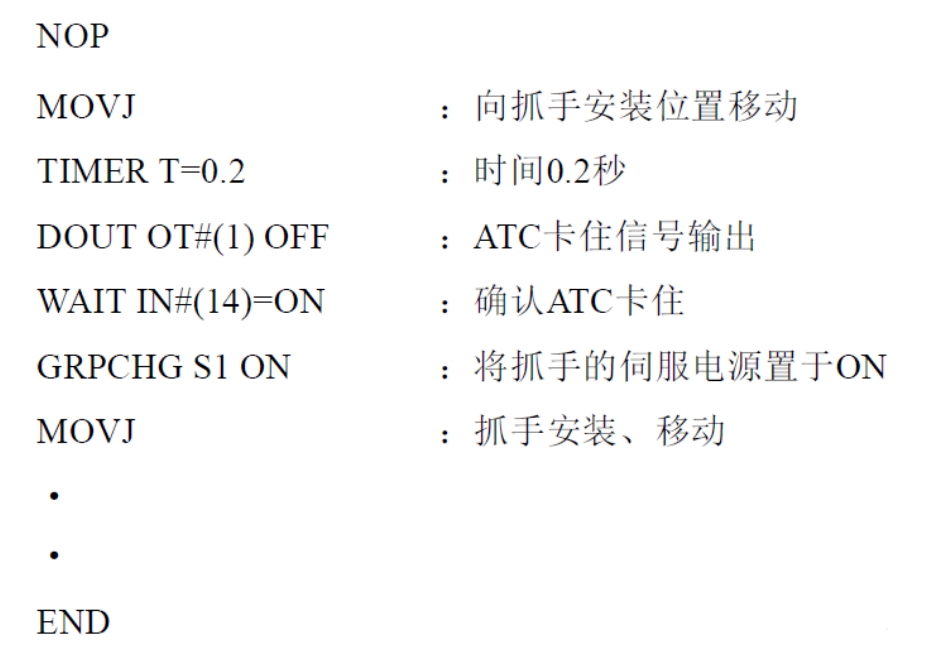
2、需要确认ATC的卡住/未卡住状态,未指定该信号,或者程序中未确认都会发生报警。该信号以通用输入信号进行识别,使用的输入信号通过参数S4C553进行设定。
例:将ATC的卡住/未卡住状态识别信号分配给IN14时,即设定S4C553=14
六、报警举例
使用过程如出现报警,参考此表:

- 下一篇:安川机器人平移程序变换功能
- 上一篇:安川机器人节拍时间测算功能
