

 联系我们
联系我们

MSHIFT指令是可通过指定坐标系计算基准位置和目标位置(平移位置)之间的平移量,设定位置变量的命令。
使用MSHIFT 命令,通过直角坐标系上的姿势位移量(Rx、Ry、Rz),可简单计算平移量。然后结合往期文章《安川机器人平移(偏移)功能》介绍的偏移指令组SFTON和SFTOF,便可实现平移量的自动建立,不需人工计算。
传统方法参考:
平移量是平移位置和示教位置X、Y、Z坐标值的差,以及RX、RY、RZ角度位移的差(通常为“0”)。平移时的平移量就是在各坐标系中X、Y、Z的增量,坐标系有四种:基座坐标,机器人坐标,工具坐标,用户坐标(在没有基座轴的系统中,基座坐标和机器人坐标为同一坐标,不能使用示教线坐标)。平移量在位置型变量P中设定,此时可以利用机器人的当前位置(坐标)来确定平移前后的距离,或者条件允许的话可以直接测量出偏移距离,然后登录在合适的P变量中,以利用当前位置的方法举例:
示教的当前位置为X:100,Y:100,Z:100
偏移后的当前位置为X:200,Y:100,Z:200
那么就可以将两个位置的差值X:100,Y:0,Z:100写入某个P变量中,比如P000,切记用的坐标系必须保持统一,然后在偏移指令SFT0N后面的偏移量写入P000即可。
二、平移量的建立
1.移动光标到要登录命令处的前一行。

2. 按下[命令一览]。
–显示命令一览。
3. 选择“ 平移”。
4. 选择MSHIFT 命令。
–在输入缓冲区中显示“MSHIFT” 命令。

5. 附加项目、数值数据的更改。
位置变量号的更改

用[数值键]输入时,按下[选择],显示数值输入框,输入数值按下[回车],更改输入缓冲区的数值。
平移坐标系的更改
(1) 在输入缓冲区中选中命令,按下[选择],显示详细编辑画面。

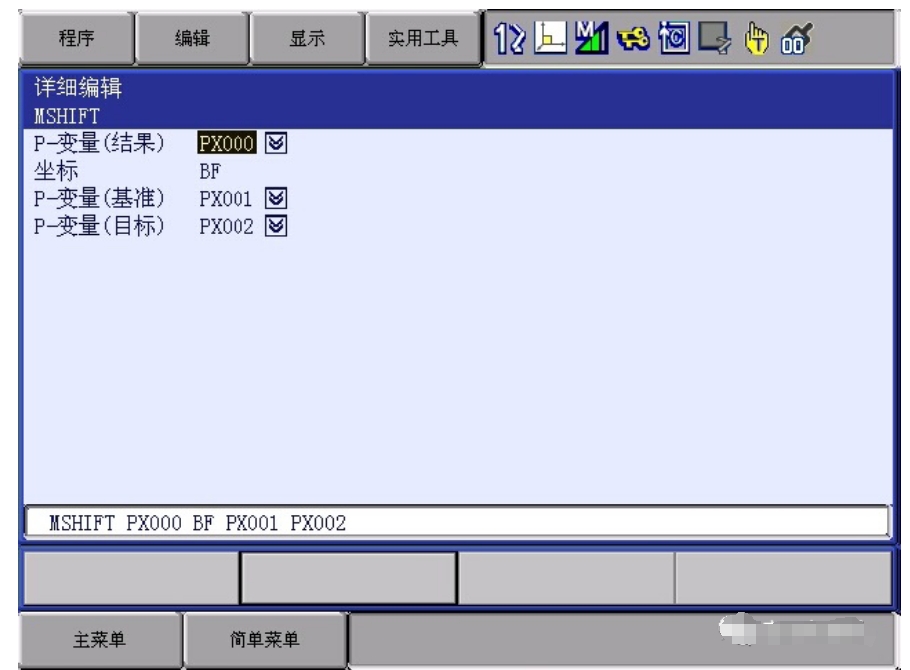
移动光标选中“ 坐标” 的“BF”,按下[选择],显示选择对话框。选择目标坐标,按下[选择]。

(2) 按下[回车]。
关闭详细编辑画面,显示程序内容画面。
6. 按下[插入]、[回车]。
–登录输入缓冲区中显示的命令。

7.再次按下[命令一览],选择“ 平移”, 选择“SFTON ”命令。
–在输入缓冲区中显示“SFTON” 命令。
8. 附加项目、数值数据的更改。
位置变量号的更改

用[数值键]输入时,按下[选择],显示数值输入框,输入数值按下[回车],更改输入缓冲区的数值。如需更改坐标系,也可以在该命令的详细编辑里进行设定,不再赘述。
相关标签:安川机器人
本文源自安川机器人,如有涉及侵权请联系删除!
- 下一篇:安川机器人程序复原功能(回收站)
- 上一篇:安川机器人平移(偏移)功能
