

 联系我们
联系我们

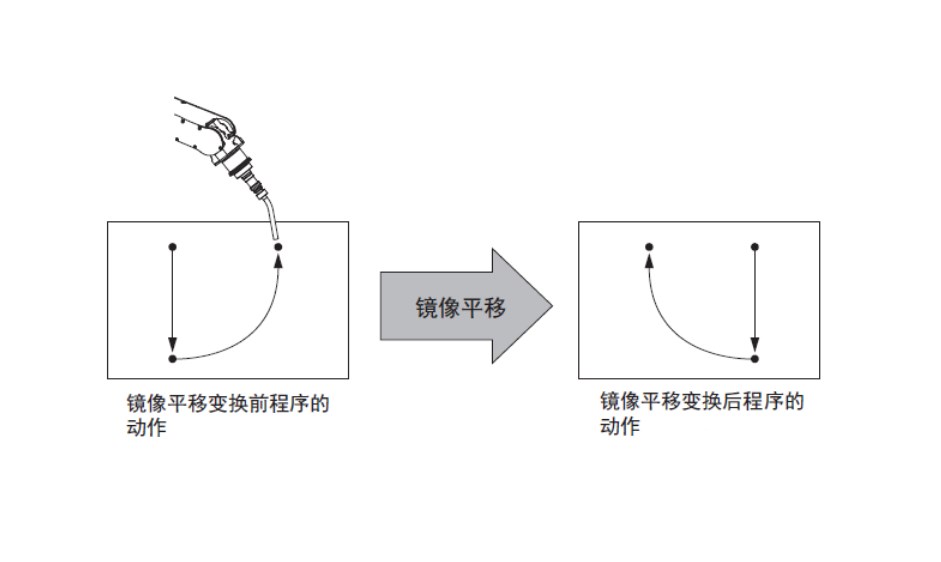
镜像平移变换功能可以用于左右对称作业时的镜像平移变换,还可对任意坐标(机器人坐标及用户坐标)中的指定面(XY、XZ、YZ 面)进行镜像平移。
镜像平移变换中分为脉冲镜像平移变换、机器人坐标镜像平移变换,用户坐标镜像平移变换。
二、脉冲镜像平移变换
对于预先用参数指定完成的轴,脉冲镜像平移变换可反转指定轴的符号。

设定参数S1CxG065指定要进行镜像平移(反转符号)的轴。

注意点:
1、不可变换无控制轴组的程序及相对程序。
2、位置型变量不能镜像平移。
3、在有多个控制轴组的系统中,若要指定变换后程序的控制轴组,则变换前和变换后控制轴组的轴结构等必须相同。
三、机器人坐标镜像平移变换

无需参数指定,镜像平移对象是所有机器人轴,镜像所用坐标为直角坐标系(世界坐标系)。
注意点:
1、不可变换无控制轴组的程序及相对程序。
2、位置型变量不能镜像平移。
3、在有多个控制轴组的系统中,若要指定变换后程序的控制轴组,则变换前和变换后控制轴组的轴结构等必须相同。
4、在机器人坐标镜像平移变换时,无法进行基座轴的镜像平移变换。
5、在机器人坐标镜像平移变换时,会对工装中所有参数被指定为镜像平移符号反转的轴进行符号反转。
四、用户坐标镜像平移变换

无需参数指定,镜像平移对象是所有机器人轴,镜像所用坐标为用户坐标系(用户坐标建立方法参考《用户坐标(UF)》)。
注意点:
1、不可变换无控制轴组的程序及相对程序。
2、位置型变量不能镜像平移。
3、在有多个控制轴组的系统中,若要指定变换后程序的控制轴组,则变换前和变换后控制轴组的轴结构等必须相同。
4、在用户坐标镜像平移变换时,会对工装中所有参数被指定为镜像平移符号反转的轴进行符号反转。
五、操作方法
1. 选择主菜单中的【程序】。
2. 选择【程序选择】。–显示程序一览画面。
3. 选择调用的目标程序。
4. 在程序显示画面选择下拉菜单中的【实用工具】,选择【镜像变换】。–显示镜像变换画面。

①变换源程序
选择变换源程序名称。移动光标,按下[选择],显示程序一览画面。
选择目标程序,按下[选择]。
②变换源控制轴组
显示变换源程序的控制轴组。
③变换程序点区间
输入目标程序点的区间。初始值是所选程序的***程序点到***终程序点。
④变换目标程序
输入变换目标程序名称。移动光标,按下[选择],进入文字输入状态。变换原程序名称会显示在输入框中。显示“***” 时,会变换为程序原程序名称。
⑤变换目标控制轴组
设定变换目标控制轴组。输入变换后程序时,会设定为和变换原程序相同的控制轴轴组。若要进行更改,移动光标,按下[选择],从选择对话框中选择。
⑥变换坐标
选择变换坐标。
脉冲 :执行当前的镜像平移变换。
机器人:以直角坐标为基准进行镜像变换。
用户 :以设定的用户坐标号为基准进行镜像变换。
⑦用户坐标号
变换坐标为“ 用户” 时,设定用户坐标号。
变换坐标为“ 脉冲”“ 机器人” 时,无法进行设定。
⑧变换基准
变换坐标为机器人或用户时,选择进行镜像变换的基准面。选项为 “XY”“XZ”“YZ”。
变换坐标为“ 机器人” 时,变换对称面为XZ 面。
⑨执行
选择【执行】或按下[回车]后,将执行镜像平移变换。未输入转换目标程序名称的话,会以转换原程序名称建立程序。
